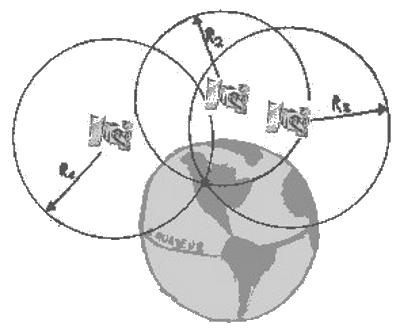
Principe de baseLe principe de détermination de position par GPS est assez simple, en connaissant la position des satellites + la distance entre le récepteur et 3 des satellites alors les coordonnées du récepteur sont entièrement déterminées. Voyez la figure pour vous en convaincre !
|
Caractéristiques des porteursChaque satellite envoie deux signaux radio, dans deux fréquences différentes (ce sont les « porteurs » des messages), chaque signal transporte un certain nombre de messages.
|
Les messagesLes informations sont transmises sous forme de modulations des porteurs (L1, L2) par des signaux digitaux binaires (des 0 et des 1). Il y a deux types de messages :
Ici encore il y a en de deux types :
Ces codes sont une suite de 0 et de 1, propre à chaque satellite. Ils ont une allure aléatoire (d'où leur nom PRN [pseudo random noise] mais il n'en est rien, ils sont en fait une signature, calée temporellement, de chaque satellite. Un récepteur est donc capable à partir d'une portion de code PRN, de le reconnaître, de savoir de quel satellite il provient et à quelle heure il a été émis. En comparant avec l'heure de réception le GPS peut donc en déduire la durée du trajet et donc (connaissant la vitesse de propagation du signal radio) la distance qui le sépare du satellite. Evidemment la mesure du temps doit être précise et synchonisée entre l'horloge du satellite et celle du récepteur. La mesure de distance (range) par cette méthode est entachée de nombreuses erreurs, dont les décalages des horloges, la valeur ainsi obtenue est appelée « pseudorange ». Le système est en constante évolution, ainsi il est prévu d'ajouter de nouveaux codes ainsi qu'un nouveau porteur pour améliorer la précision et la fiabilité du GPS. Message de navigationLe message de navigation est envoyé sur les deux porteurs L1 et L2, la durée d'un message complet est de 750 sec. (12.5 min.). Il contient les informations sur la position des satellites, l'état des satellites, les corrections sur leurs horloges ainsi que des données atmosphériques.
|
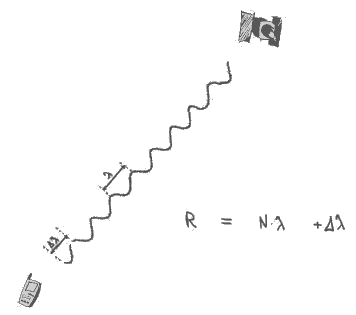
Mesures basées la sur phase des porteursIl existe une méthode bien plus précise pour déterminer la distance au satellite, basée sur le signal porteur (onde sinusoidale). En multipliant le nombre de cycles effectués entre le satellite et le récepteur par la longueur d'onde du porteur on obtient la distance avec une précision de moins de 2mm. La difficulté principale de cette technique consiste à déterminer le nombre initial de cycles effectués… ce problème est appelé « initial cycle ambiguity ».
|
Modes de positionnementMode autonome La technique la plus simple consiste à mesurer le pseudorange présenté ci-dessus à l'aide d'un seul récepteur. Comme déjà mentionné la mesure est perturbée par l'incertitude sur l'horloge du récepteur. Outre les trois inconnues relatives à la position spatiale il faut donc ajouter une inconnue pour résoudre la correction sur l'horloge du récepteur. Le nombre minimal de satellites nécessaire est donc de quatre. Depuis la supression de la SA la résolution latérale de cette technique est de 22m environ. Mode relatif ou différentiel (DGPS) En utilisant deux récepteurs qui suivent les mêmes quatre satellites la résolution peut alors être ramenée à quelques centimètres. L'un des récepteurs est fixe et sa position est connue avec précision; le second est mobile. Les erreurs dues aux satellites et celles dues à l'atmosphère étant identiques sur les deux récepteurs (et la position du premier étant connue) on peut en déduire une position corrigée pour le deuxième récepteur. Il y a de nombreuses variantes de cette technique, en utilisant la mesure du pseudorange ou celle de la phase de l'onde porteuse, avec une correction directe ou à postériori etc... La technique de correction WAAS (EGNOS en Europe, MTSAT en Asie) est une variante du positionnement relatif. La correction calculée à partir d'une série de stations terrestres est transmise au récepteur via des satellites géostationnaires. La précision pour un récepteur utilisant la mesure du pseudorange est alors de 3 à 5 m, cependant la réception des satellites géostationnaires nécessite un ciel bien dégagé vers le Sud (si on est dans l'hémisphère Nord!) 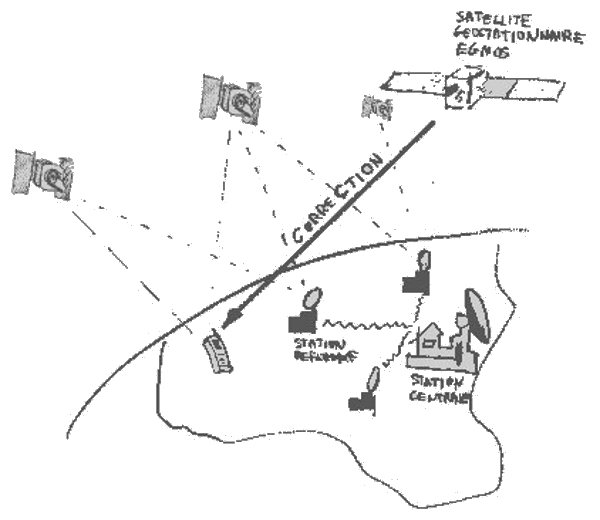 Figure 3: Fonctionnement du système WAAS (EGNOS en Europe). |
Chapitre précédant - Chapitre suivant
|
Bibliographie
|
Retour à la Table des Matières
